 木果创客mbot机器人
木果创客mbot机器人经常有朋友问木果,有时候主控板接口不够用,怎么办?
这时候,其实可以使用多个主板进行扩展的,有分别独立工作,有协同工作两种方式。
今天收到紫薇跟大家分享一个示例程序,就是用两块mCore主板实现主从单向通信的案例,感觉提供了一个很好的协同工作的思路。
一个主板按下按钮后,另一个主板的led就能点亮!
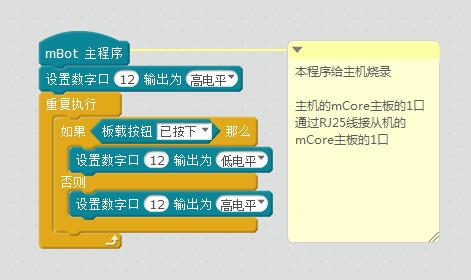
第一步:准备两个mCore主板,然后选择其中一个为主机,另外一个为从机。
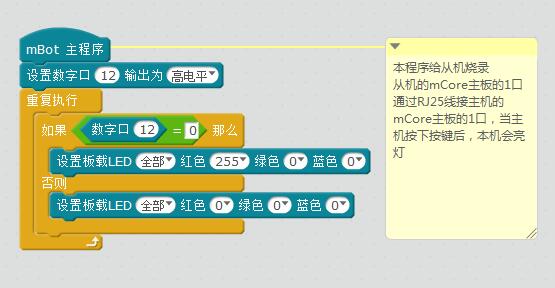
第二步:主机烧录主机程序,从机烧录从机程序
mbot通信源程序下载
第三步:两主板接上电池,打开开关,用一条RJ25线,一端接主机的1口,另一端接从机的1号口。
第四步:按一下主机的按键,从机的灯会亮,松开,会熄灭
如果出现红色不兼容指令,请在扩展选择”Arduino”.
另外还可以利用两个IO口同时使用,就可以让一个Port口分别控制四种情况:1 1, 1 0, 0 1, 0 0,跟巡线的原理是一样的(巡线一个接口能识别四种状态),而本示例只用了Port口的一个IO口,只能检测两个状态,建议用数字口通信。
当然,也可以用mCore主板的红外发射和接收功能,实现主从通信。
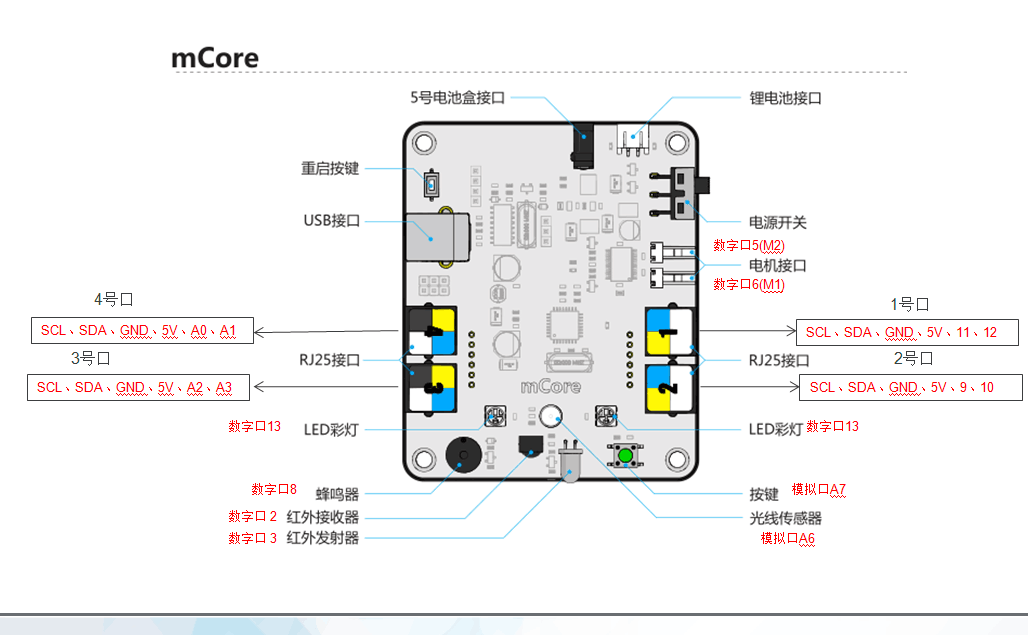
附上mcore原理图:
未经允许不得转载:木果创客mbot机器人 » mBot机器人设置多块mCore主板通信互动案例分享
评论前必须登录!
注册