 木果创客mbot机器人
木果创客mbot机器人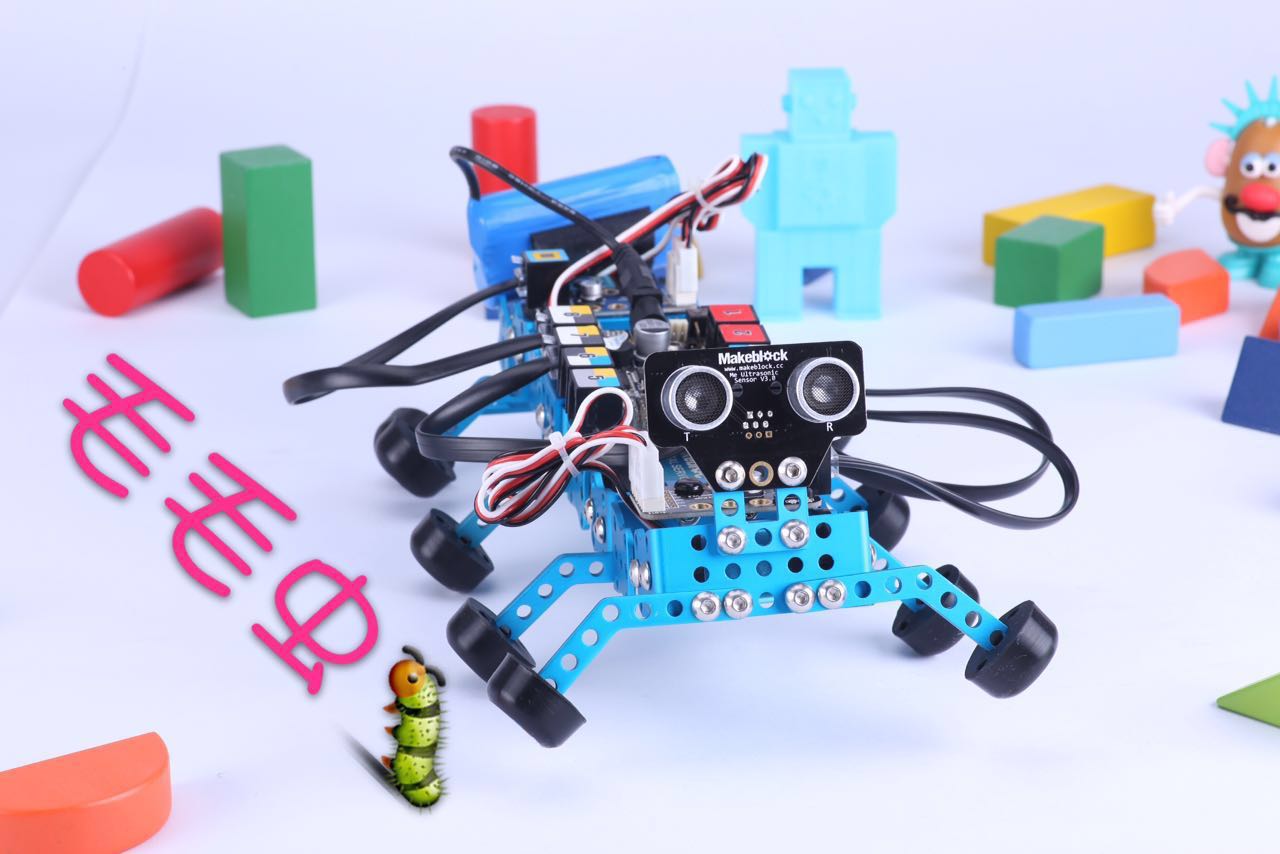
相信各位小伙伴都见过毛毛虫了,但是,大家有没有仔细看看,毛毛虫是怎样移动的呢?它的身体结构又是怎样的呢?想不想自己搭建一个属于自己的机械仿生毛毛虫?好,这次的“智”造万物系列,让我们一起来DIY属于自己的仿生毛毛虫吧。

在DIY仿生毛毛虫之前,我们要知道什么是仿生?仿生学是一门模仿生物的特殊本领,利用生物的结构和功能原理来研制机械或各种新技术的科学技术。它是一门新型边缘学科。研究对象是生物体的结构、功能和工作原理,并将这些原理移植于人造工程技术之中。该学科的问世,大大开阔了人类的技术眼界,显示了巨大的发展潜力,是人类智慧的结晶。
所以,要DIY仿生毛毛虫,需要了解毛毛虫的爬行过程,生活习惯,经典动作等等。我们细心点就会发现,毛毛虫蠕动的形式向前爬行,身子一缩一松,就爬行一步。当我们手抓起它时,它会挣扎,一下子往上撬动,一下子往下缩团。当遇到障碍物,毛毛虫会停止思考一下,然后转向。
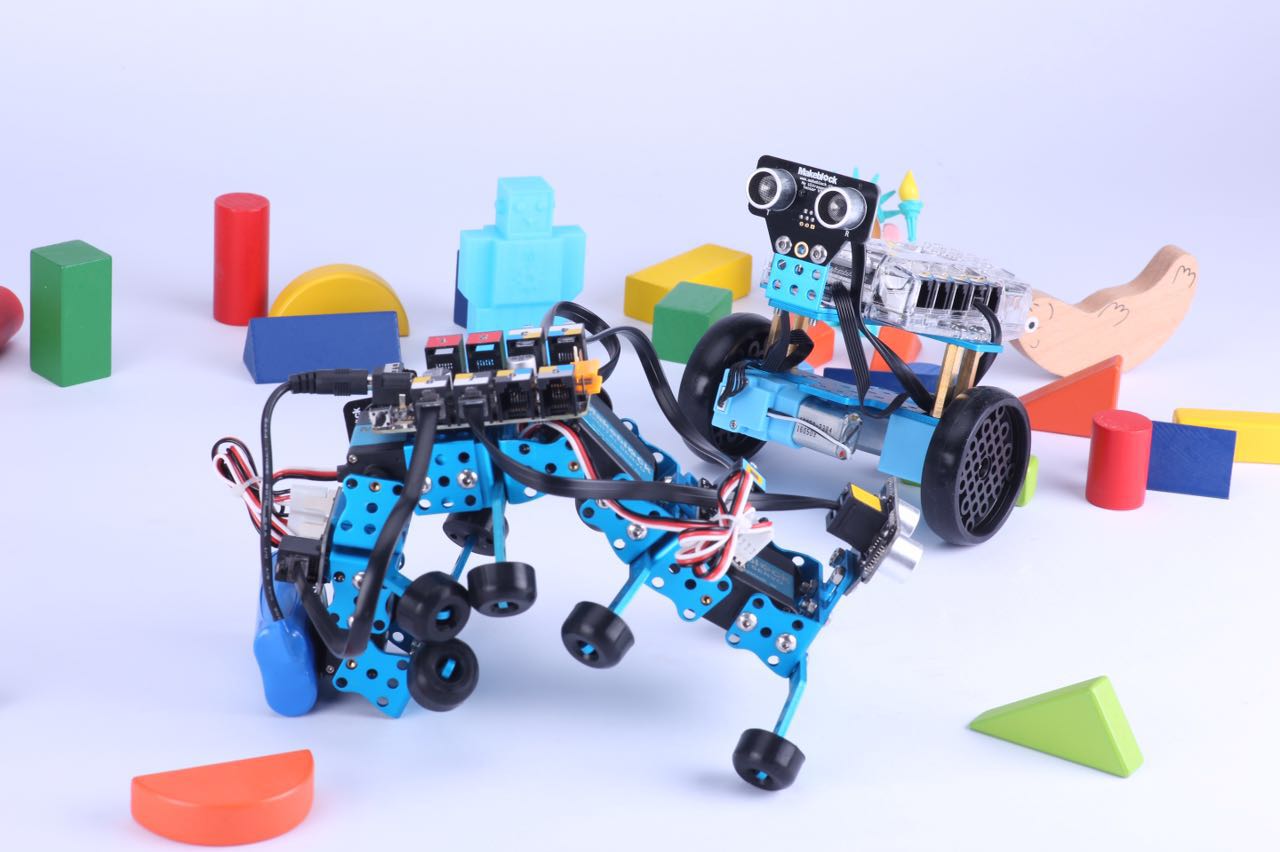
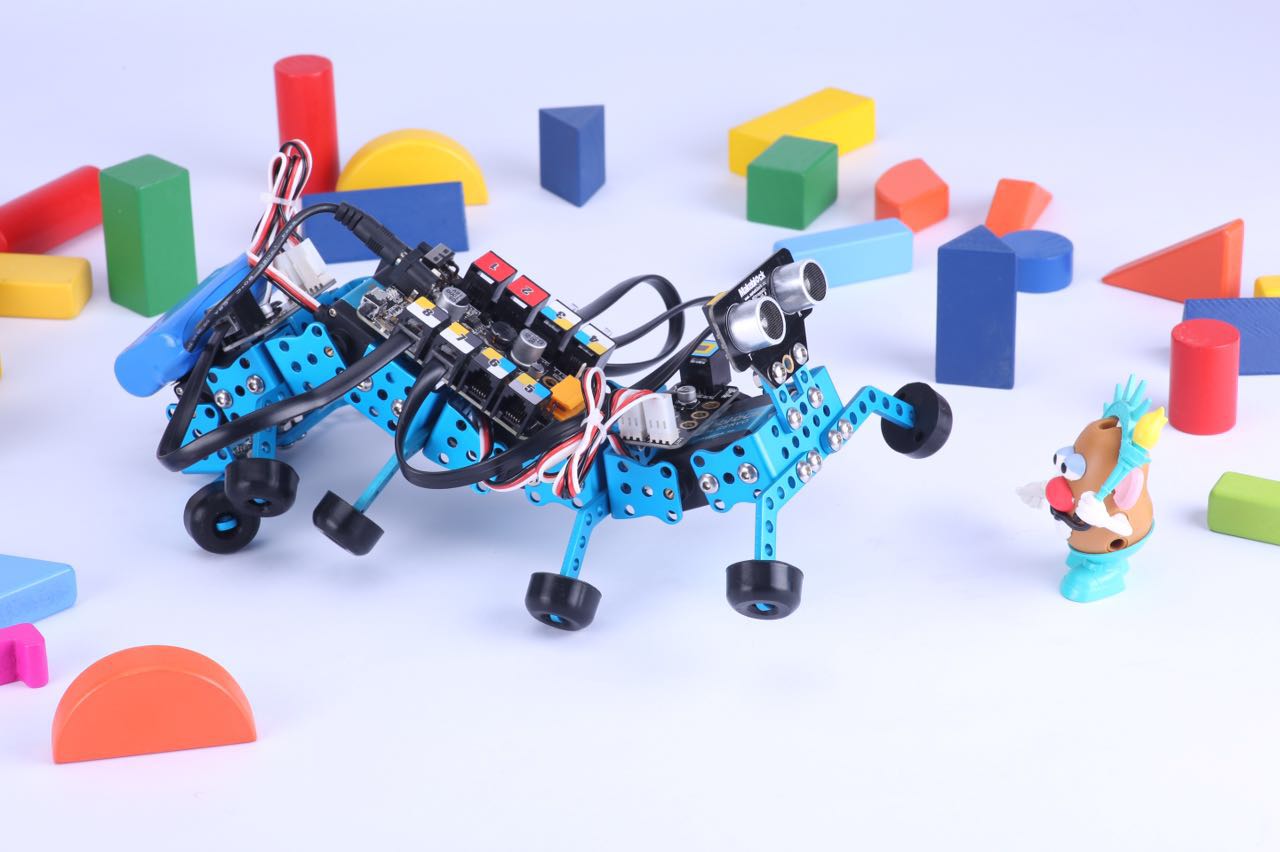
我们根据毛毛虫这些习性,挑选对应的电子模块和机械零件吧。由于毛毛虫是蠕动前进,且蠕动幅度不大,我们就选择舵机作为主驱动,毛毛虫关节很多,我们就选择4个舵机加对应机械零件形式搭建成毛毛虫的躯干。超声波可以检测距离,我们用超声波模块来检测毛毛虫到障碍物的距离。那怎么让仿生毛毛虫检测到人抓到它的情况呢?别忘记,我们还有触摸模块,将触摸模块放到毛毛虫身上,人抓起来就能检测啦。至于毛毛虫大脑,我们就用Orion主控板控制就行啦。
该案例为Makeblock特殊展示商品,仅提供木果创客的makeblock资深玩家购买,根据案例下载中的清单,购买材料需要1500元左右,数量不多,玩家可以向木果qq号 842311 咨询。
未经允许不得转载:木果创客mbot机器人 » Makeblock“智”造万物之仿生毛毛虫案例
评论前必须登录!
注册